什么人适合看?
1、你刚刚开始接触无人机;
2、你平时只是玩无人机,并没关心相应的知识点的人(缺少理论知识的人)。
本文为系列内容。写作形式都为《无人机入门之***篇》,方便每个人只看自己需要的那部分。没规律可言,也不是按顺序写。可能是按笔者突发奇想的内容写,也可能拍脑袋想的,也可能根据评论区的需求写。通常第一篇应该写无人机的发展历史什么的,先暂时忽略,因为对实用主义者用处不大。我也记不清楚,写的话还需要查资料。更新频率根据用户需求来确定。如果不更新了,大概的可能是没人看。这篇作为首篇文章吧。文章尽量简短,看的人也不必浪费太多时间。
本人写作水平有限,如果有写的错误的地方。请在评论区不吝指出。最近上海疫情严重,被隔离在家,足不出户,找点事情做,抽空开始写文章。时间紧促,难免有错误之处,请在评论区指正。
笔者还是根据自己习惯写作,没时间的人直接拉到最后看【小结】。每篇文章我都在最后做个小结,小结就是本章的重点内容。
【声明】
本人没有得到任何无人机品牌的资助,保持中立写作。本文涉及的品牌只是文章中的内容需要而已,并不代表推荐。大疆、道通、哈博森都是无人机的优秀品牌,各自有各自的特点。
【正文】
本文涉及到的无人机没有明确标注的都是多旋翼无人机。(飞行操作也是指多旋翼无人机的操作)
操作无人机最重要的就是遥控器也称手柄,有种打游戏的感觉,现在越做越像游戏机手柄了。(少数用体感遥杆,飞行体验,但做不了特技,暂时不提),遥控器人为操作失误是导致无人机炸机比重中最高的。
2个十字摇杆
操作无人机最重要的就是遥控器的2个十字摇杆。一个用左手拇指操作,一个用右手拇指操作(也有用拇指和食指共同操作的通常被认定为防抖方式)。
2个十字摇杆,对应的是4个通道(通道这个词航模中用到的比较多,例如6通道遥控航模)。
四个通道对应的分别为:
副翼 AIL:无人机绕纵轴做横滚运动(向左或向右移动)
升降舵 ELE:无人机绕横轴做俯仰运动(向前或向后移动)
油门 THR:无人机沿立轴升降运动(上升或下降)
方向舵 RUD:无人机绕立轴做偏航(向左或向右水平旋转)
名字比较奇怪?是的这里说明一下,这个涉及到无人机的发展历史(预留吧,本人还没写,如果后续写了这里会加上链接),早期的无人机是固定翼,现在大多数普通玩家用的是多旋翼无人机,多旋翼无人机因为出来的比较晚。所以这个命名规则全部是按照固定翼定义的。
2个十字摇杆,根据设置的不同,分为三种手:美国手、日本手、中国手(较少有人使用)。拿到遥控器,第一步就需要确定遥控器设置的是哪种手和自己的使用习惯是否相同,否则可能起飞就炸机。
美国手
左手横向:方向舵 RUD
左手纵向:油门 THR
右手横向:副翼 AIL
右手纵向:升降舵 ELE
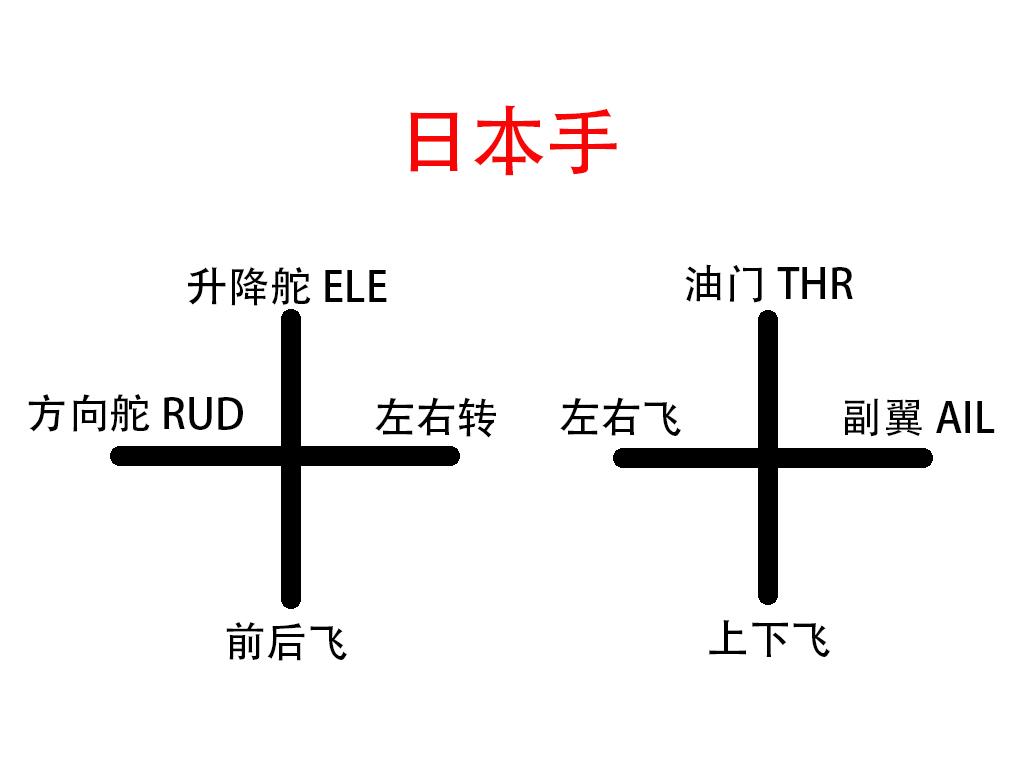
日本手
左手横向:方向舵 RUD
左手纵向:升降舵 ELE
右手横向:副翼 AIL
右手纵向:油门 THR
中国手(极少人使用,不推荐使用,有的遥控器不能设置中国手)
左手横向:副翼 AIL
左手纵向:升降舵 ELE
右手横向:方向舵 RUD
右手纵向:油门 THR
遥控器的分类:
遥控器按照油门是否回中,可以分为自动回中遥控器和不回中遥控器。回中遥控器一般可以软件设置美国手和日本手,不回中遥控器一般硬件锁死,买错手就用不了了,买的时候要注意一下。(当然少数也有可调的)。
这里补充一下,一般只有商业航拍无人机油门是自动回中的(回中后无人机在空中是悬停状态)。自己组装的无人机,或者穿越机(Dji FPV 手动挡)油门是不回中的,起飞前油门杆需要拉到最低点。
遥控器按照是否带屏幕,分为带屏幕遥控器和不带屏幕遥控器。不带屏幕版本的通常用手机(也有用头戴的)进行图传显示。带屏幕版本的屏幕亮度比较高,适合白天太阳下操作,手机亮度相对比较低,太阳底下操作最好配一个遮光罩。

不带屏幕不回中遥控器

带屏幕自动回中遥控器
其他操作键(不是每台无人机所有的按钮都有)
拍照按钮:拍照片。
摄像按钮:拍视频。
云台俯仰拨轮:操作相机云台上下转动。
变焦拨轮:操作相机变焦。
急停按钮:让无人机快速空中悬停。
返航按钮:让无人机自动返回设定的返航点。
档位切换:平稳档、普通挡、运动档(也有的叫狂暴档、手动档,反正都是一个意思)。各种档位限速不一样,新手拍摄时用平稳档,飞行时用普通档。新手请勿使用运动档,运动档各种避障功能都被关闭。
遥控器需要多加练习才能飞好无人机,也是顺滑航拍的关键。笔者就没有练好,还得需要多多练习。
起飞
自动起飞:点软件App“一键起飞”功能。(有的遥控器上有起飞按键)
手动起飞:2个十字摇杆内八或外八解锁,桨叶平稳转动后,慢慢向上推油门起飞。(有的是油门右下角长按解锁)
降落
自动降落:点软件App“自动降落”功能。(有的遥控器上有降落按键)
手动降落:油门慢慢收,无人机触地后油门收到底,等桨叶停转再放开油门。(有的是油门左下角长按停桨的)
飞行
上升下降:推油门杆向前为上升,向后为降落。
前后飞行:推升降舵向前为前飞,向后为倒飞。
左右飞行:推副翼向左为左飞,向右为右飞。
左右转向:推方向舵向左为左转,向右为右转。
飞行原理(暂时提一下,这里不需要太关心。如果有需求会单独写一篇)
多旋翼无人机,旋翼电机数目一般为双数(例如4轴、6轴、8轴多旋翼无人机),一正桨(CCW 逆时针旋转)、一负桨(CW 顺时针旋转)逐个交替安装。(如果旋翼为单数,需要一个舵机平衡反扭矩)
前飞:横轴前侧旋翼电机减速,后侧旋翼电机加速。无人机姿态:前低后高。
倒飞:横轴前侧旋翼电机加速,后侧旋翼电机减速。无人机姿态:前高后低。
左飞:纵轴左侧旋翼电机减速,右侧旋翼电机加速。无人机姿态:左低右高。
右飞:纵轴左侧旋翼电机加速,右侧旋翼电机减速。无人机姿态:左高右低。
左转:所有顺时针旋翼电机加速,逆时针旋翼电机减速。无人机姿态:水平左转。
右转:所有顺时针旋翼电机减速,逆时针旋翼电机加速。无人机姿态:水平右转。
上升:所有旋翼电机同时加速速。无人机姿态:水平上升。
下降:所有旋翼电机同时减速。无人机姿态:水平下降。
4轴无人机损坏一个电机就炸机。
6轴无人机损坏一个电机后,会停转对角的电机,保持平衡。(单备份)
8轴无人机损坏一个电机后,会停转相邻的电机,保持平衡。(双备份)
【小结】

美国手操作杆